焊接机器人传感技术及传感器应用
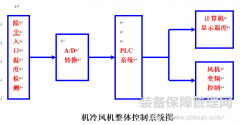
机器人首要满足末端操作器的运动要求,即控制末端操作器的运动轨迹、运动速度和加速度等。常见串联机器人的运动被分解为各个关节或各个轴伺服系统的运动。为了保障伺服系统的高速、频繁启停动作和精确定位,伺服系统一般采用位置、速度和加速度闭环控制方式。
为了实现上述闭环控制,在机械手驱动器中都装有高精度测角、测速传感器。测速传感器可采用测速发电机或编码器,测角传感器一般都采用精密电位计或编码器。
除了机器人上的通用传感器外,弧焊机器人特有的弧焊传感器一般用于焊缝跟踪、焊接条件检测、电弧或熔池形态的检测。而其中应用最多的是焊缝跟踪传感器。点焊机器人要求末端操作器的运动快速而平稳,对运行轨迹没有跟踪要求。
焊接机器人系统的变位机是机器人系统的一部分,在用伺服电动机驱动变位机时,常用接近开关来检测变位机的工作原点。由于伺服电动机本身带编码器,
对于定位精度没有特殊要求的焊接系统,不再外置位置和速度传感器,伺服电动机自带的编码器就可以完成电动机转动位置和转动速度的检测。
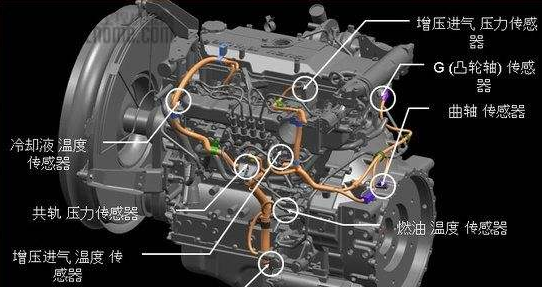
传感器是用来检测机器人自身的工作状态,以及机器人智能探测外部工作环境和对象状态的核心部件。能感受规定的被测量,并按照一定的规律转换成可用输出信号的器件或装置。本文首先介绍了常用传感器的工作原理、基本结构、使用特点,并讨论了传感器在智能机器人中的应用。
同时,为了检测作业对象及环境或机器人与它们的关系,在机器人上安装了触觉传感器、视觉传感器、倾角传感器(倾角模块、力觉传感器、近觉传感器、超声波传感器和听觉传感器,大大改善了机器人工作状况,使其能够更充分地完成复杂的工作。由于外部传感器为集多种学科于一身的产品,有些方面还在探索之中,随着外部传感器的进一步完善,机器人的功能越来越强大,将在许多领域为人类做出更大贡献。
为了实现在复杂、动态及不确定性环境下的自主性,目前各国研制人员逐渐将视觉、听觉、压觉、热觉、力觉传感器等多种不同功能的传感器合理地组合在一起,形成机器人的感知系统,为机器人提供更为详细的外界环境信息,进而促使机器人对外界环境变化做出实时、准确、灵活的行为响应。
TPM,点检,班组建设,管理能力咨询培训@左明军老师.微信:13808969873

 关联文章
关联文章



 精彩导读
精彩导读




 热门文章
热门文章 最新标签
最新标签